Studio说明书
Studio说明书
一、连接说明
连接示意图
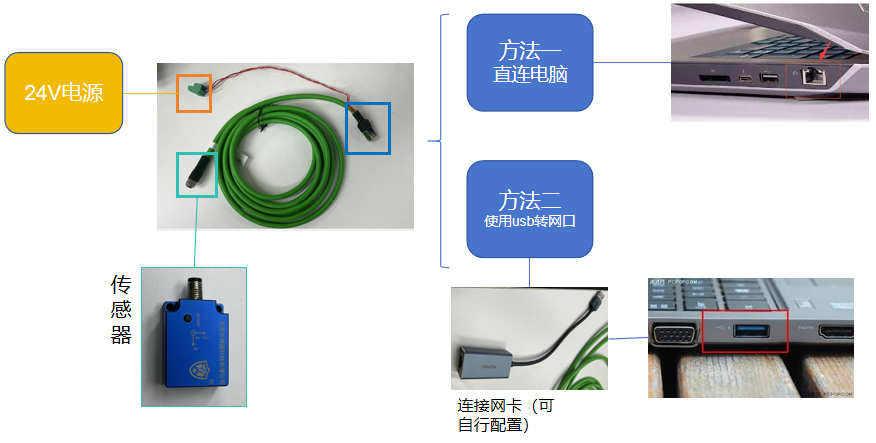
二、控制方式
1.上位机连接
按上述方式连接传感器
获取上位机软件并安装

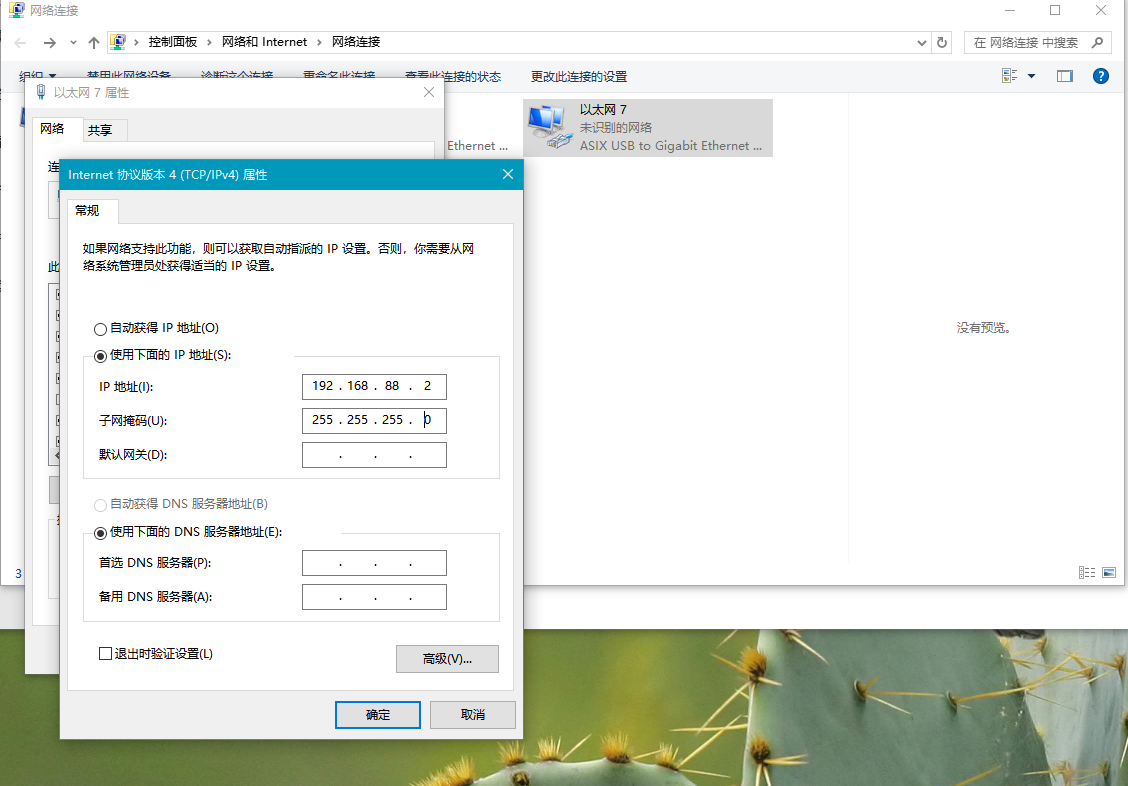
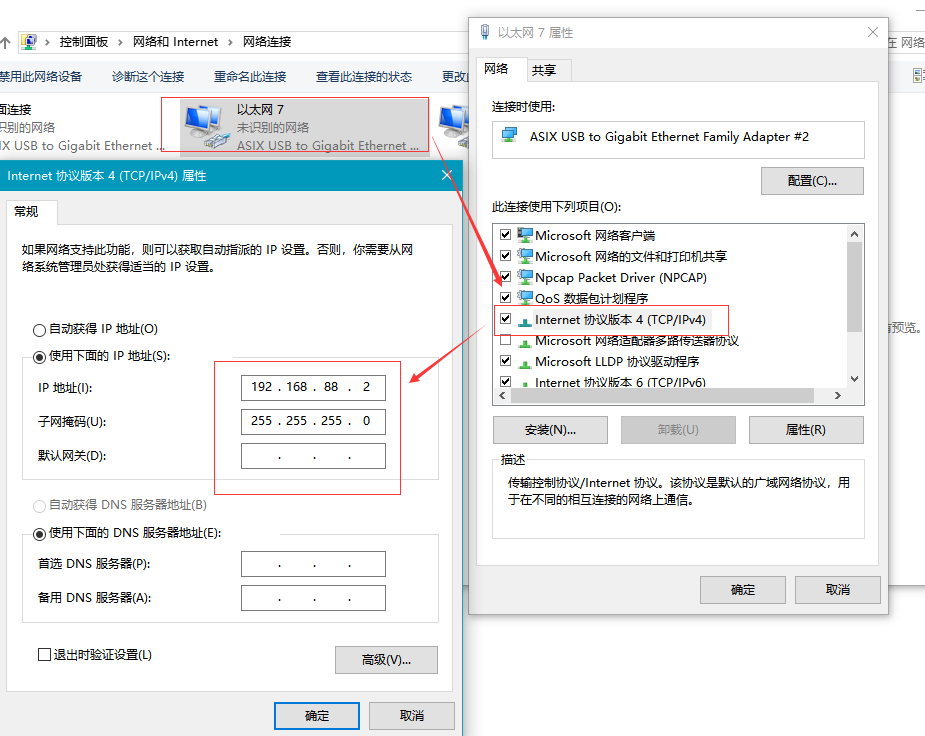
在传感器与电脑连接后,设置连接网卡的地址为192.168.88.2
2.页面说明
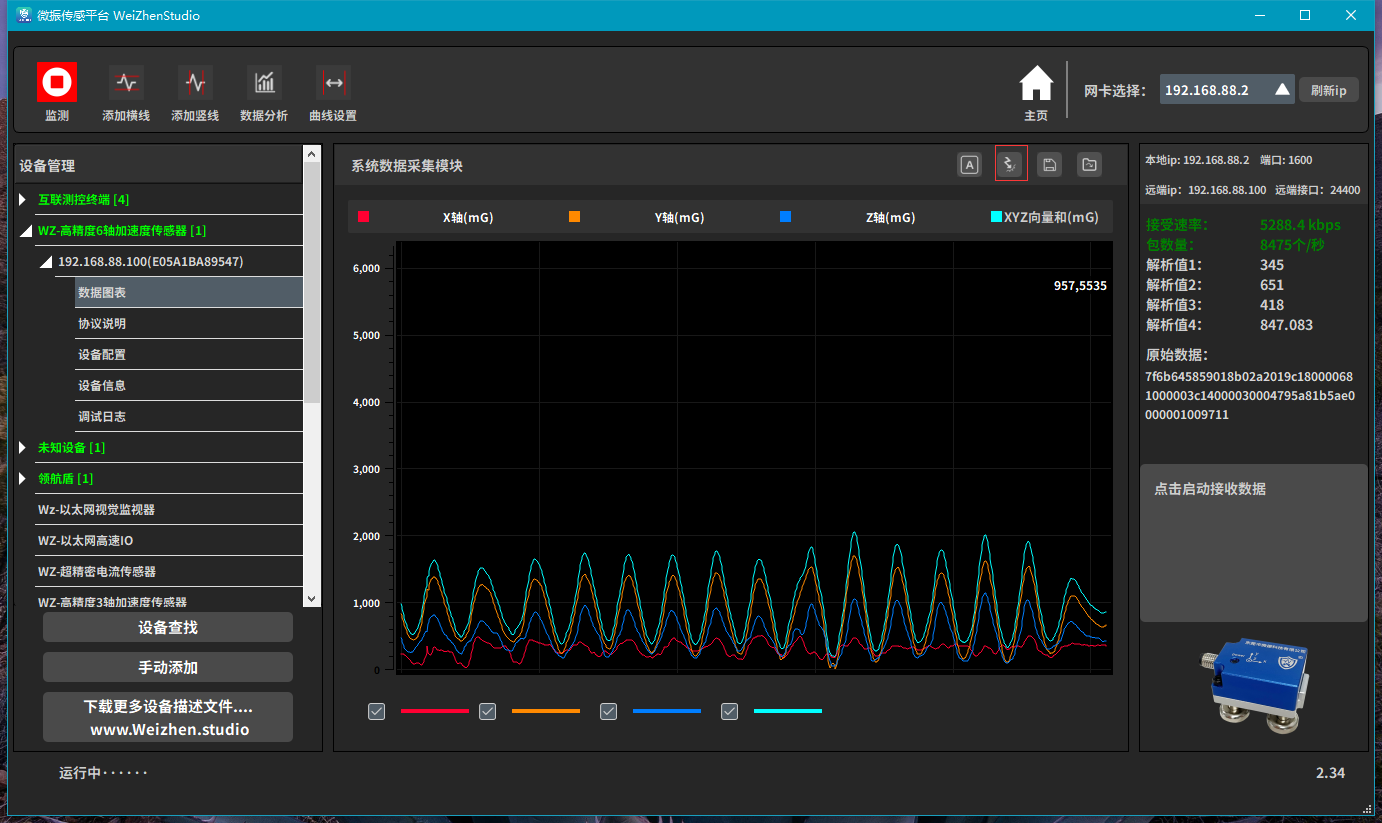
打开已经安装好的 WeiZhenStudioHMI

网卡选择 192.168.88.2,如果没有该网卡,点击刷新再选择

等待连接或是点击设备查找,此时连接的设备会显示绿色,双击或者是点击展开图标选择功能
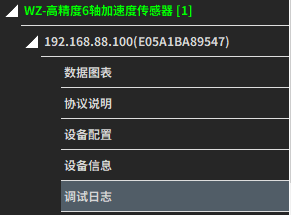
数据图表
数据图表可以实时查看现在的数据

点击切换图表合并-分开显示模式
协议说明
对传感器传入的源数据进行解析,关于如何进行数据解析查看 传感器数据解析

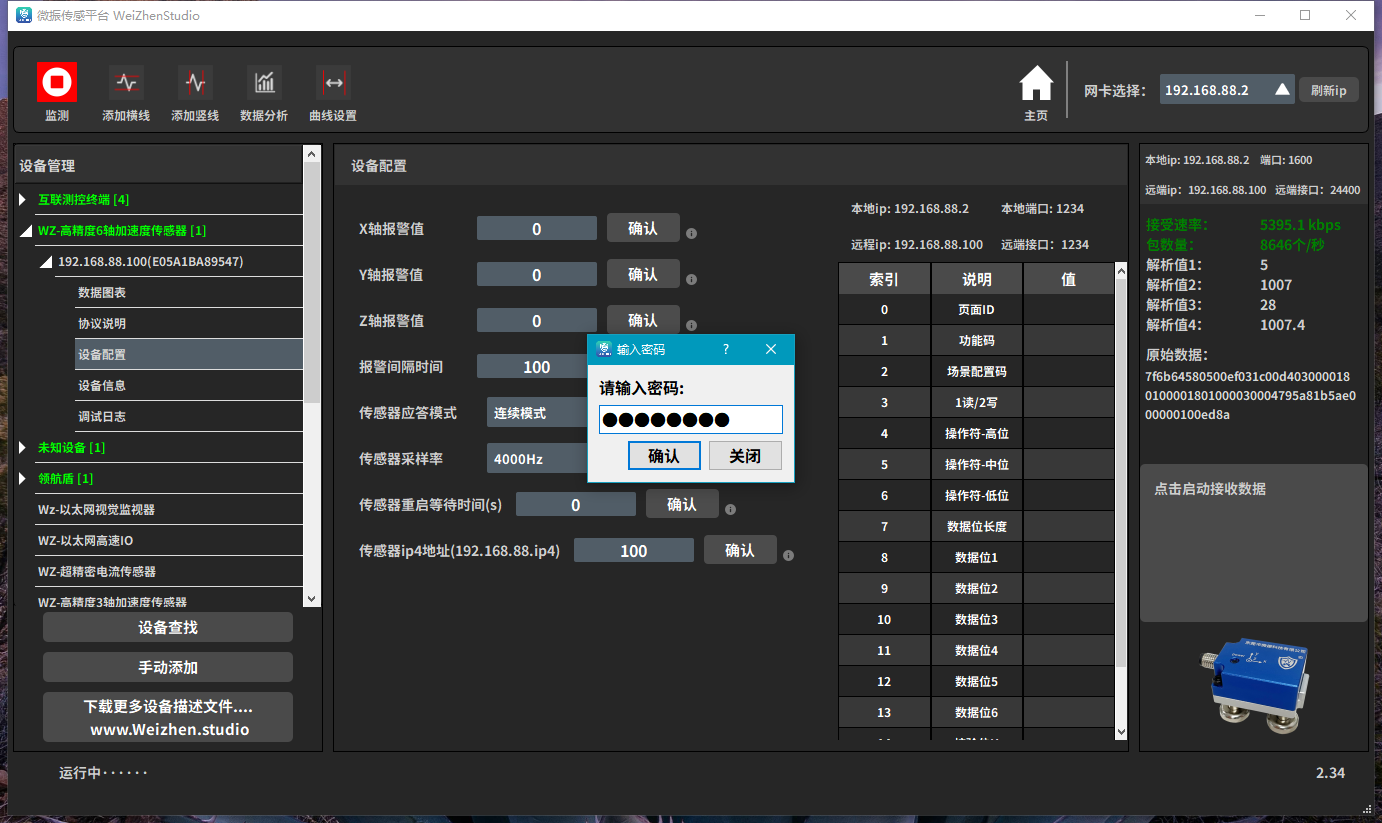
设备配置
对传感器的各项设置与设置的指令。

点击确认之后会修改传感器对应设置,但是部分重要设置需要输入密码验证
对此项设置 不了解请不要改动
密码为:wz202401
设备信息
传感器的各项信息

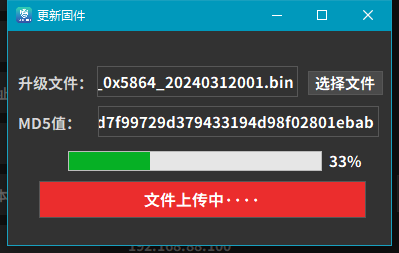
版本升级操作
更新包

解压缩

点击协处理器版本右边的升级图标


选择完毕之后点击升级

等待升级
升级成功
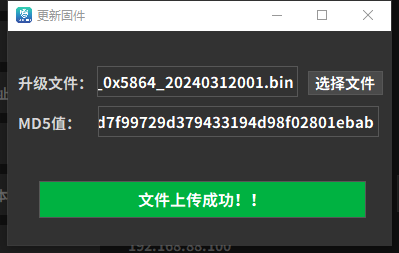
等待传感器重启之后,
点击 设备查找 查看版本号是变更与version.txt 描述一致

调试日志
工程师调试使用,记录程序启动、指令下发的操作。

三、传感器数据解析
通信服务相关信息
传感器数据协议为UDP通信协议
UDP服务相关的传感器端口,发送目的端口、IP均不会变化,只有不同传感器的默认IP会不同。
以下采用WZ-高精度6轴加速度传感器为示例
WZ-高精度6轴加速度传感出厂的默认IP为192.168.88.100
以下是各个页面的数据端口
实时数据
| 属性名 | 属性值 |
|---|---|
| 传感器IP | 192.168.88.100 |
| 传感器port | 24400 |
| 用户端IP | 192.168.88.2 |
| 用户端端口 | 1600 |
具体通信协议见studio协议说明页面
设置数据
| 属性名 | 属性值 |
|---|---|
| 传感器IP | 192.168.88.100 |
| 传感器port | 1234 |
| 用户端IP | 192.168.88.2 |
| 用户端端口 | 1234 |
调试日志
| 属性名 | 属性值 |
|---|---|
| 传感器IP | 192.168.88.100 |
| 传感器port | 2345 |
| 用户端IP | 192.168.88.2 |
| 用户端端口 | 2345 |
设备查找
| 属性名 | 属性值 |
|---|---|
| 传感器IP | 192.168.88.100 |
| 传感器port | 9568 |
| 用户端IP | 192.168.88.2 |
| 用户端端口 | 9568 |
协议说明
UDP通讯协议解析
连接传感器后点击协议说明查看UDP通讯解析协议
| UDP包内字节位置 | 字符含义 | 说明 | 字节序 | 解析示例 |
|---|---|---|---|---|
| 第4位到第5位 | uint16 | X轴振动值 | 低位在前 | std::memcpy(&x, buffer + 4,sizeof(x)); |
| 第6位到第7位 | uint16 | Y轴振动值 | 低位在前 | std::memcpy(&y, buffer + 6,sizeof(y)); |
| 第8位到第9位 | uint16 | z轴振动值 | 低位在前 | std::memcpy(&z, buffer + 8, sizeof(z)); |
设置参数协议
点击设置后面的圆点可以查看此项将会发送什么指令给传感器
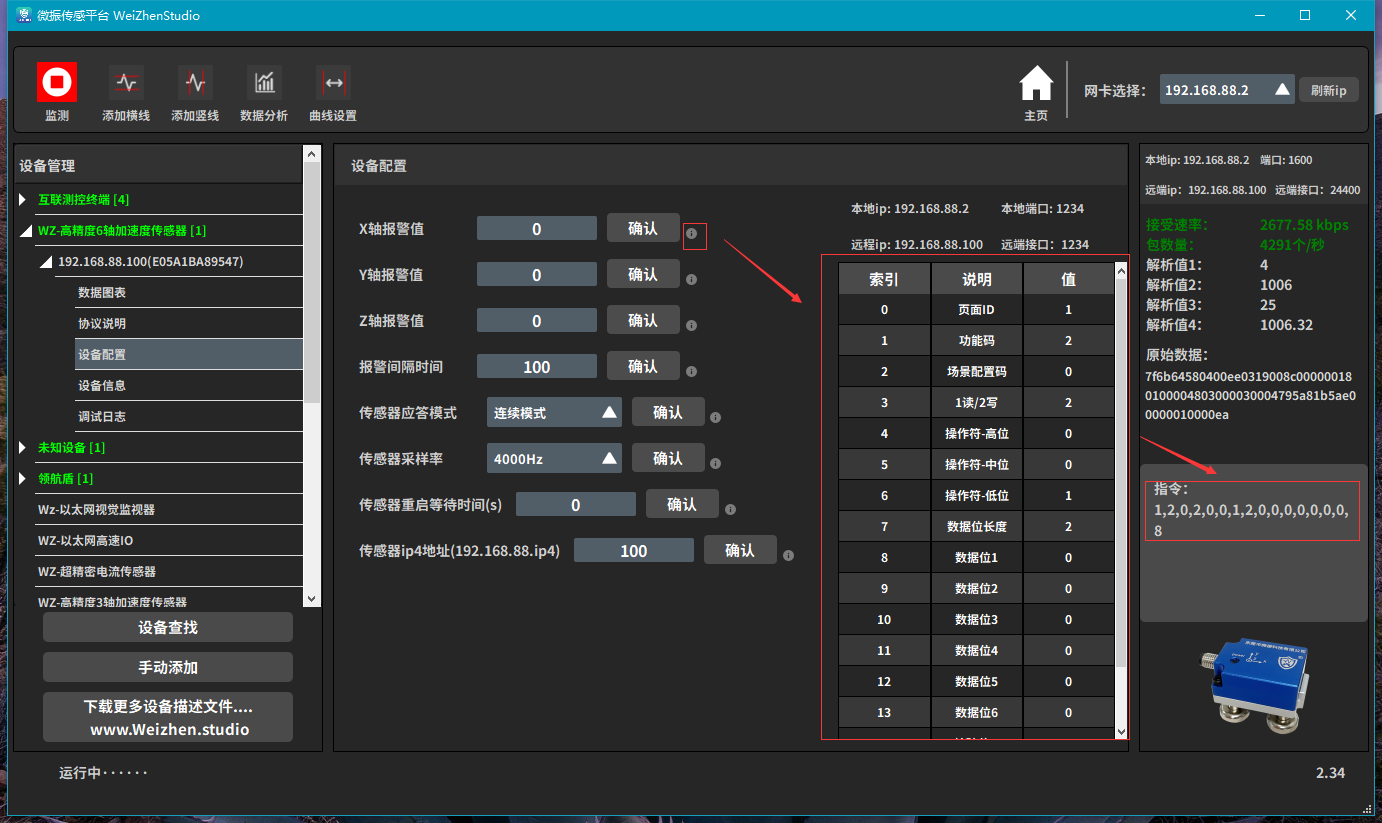
发送格式为
struct CommandData
{
// 页面ID
uint8_t tabId ;
// 功能码
uint8_t functionCode ;
// 场景配置码
uint8_t sceneConfigurationCode;
// 1读/2写
uint8_t readOrWrite;
// 操作符-高位
uint8_t Addr_H;
// 操作符-中位
uint8_t Addr_M;
// 操作符-低位
uint8_t Addr_L;
// 数据位长度
uint8_t Addr_Len;
// 数据位
uint8_t Flash_Data_1;
uint8_t Flash_Data_2;
uint8_t Flash_Data_3;
uint8_t Flash_Data_4;
uint8_t Flash_Data_5;
uint8_t Flash_Data_6;
// 校验位
uint8_t CRC_H;
uint8_t CRC_L;
};
报警功能
对振动传感器有特殊的报警功能

报警回传一条日志信息格式为
struct AlarmLog
{
// 页面ID 恒定为2
uint16_t tabId = 2;
// 头部(类型码)
uint16_t type ;
// 报警轴 x:0;y:1;z:2
uint16_t warnChannel;
// 报警值
uint16_t warnValue;
// 故障值
int16_t realValue;
// 时间戳
uint32_t time;
};
传感器应答模式
1.连续模式(数据端口:1600)
初始默认状态,传感器主动发送数据、数据按照解析表格解析
2.单次模式(数据端口:1234)
只有在下发指令1,200,1,1,0,0,0,0,0,0,0,0,0,0,0,0才会回传一次数据(发送一次,获取一次数据)。
回传数据会在原始的振动数据加一个u16长度的的头部恒定为1来区分数据包类型
即回传数据为: 头部页面ID+原始数据
格式示例:
struct sensorData
{
// 页面ID 恒定为1
uint16_t tabId = 1;
/*------按照原始表格解析---------*/
// 设备类型
uint16_t type ;
//··· ··· 省略原始数据
//CRC校验
uint16_t CRC ;
/*------按照原始表格解析------*/
};
四、传感器问题汇总
问题一 连接问题
软件点击“监测”后还是无法采集传感器数据
排查步骤1:检查网卡IP地址是否正确
在使用studio时设置了错误的网卡地址导致无法接受到传感器数据

传感器数据接收端地址应该时192.168.88.2,请正确设置网卡地址
排查步骤2:任务管理器数据
打开任务管理器查看连接传感器的网卡是否有数据传入
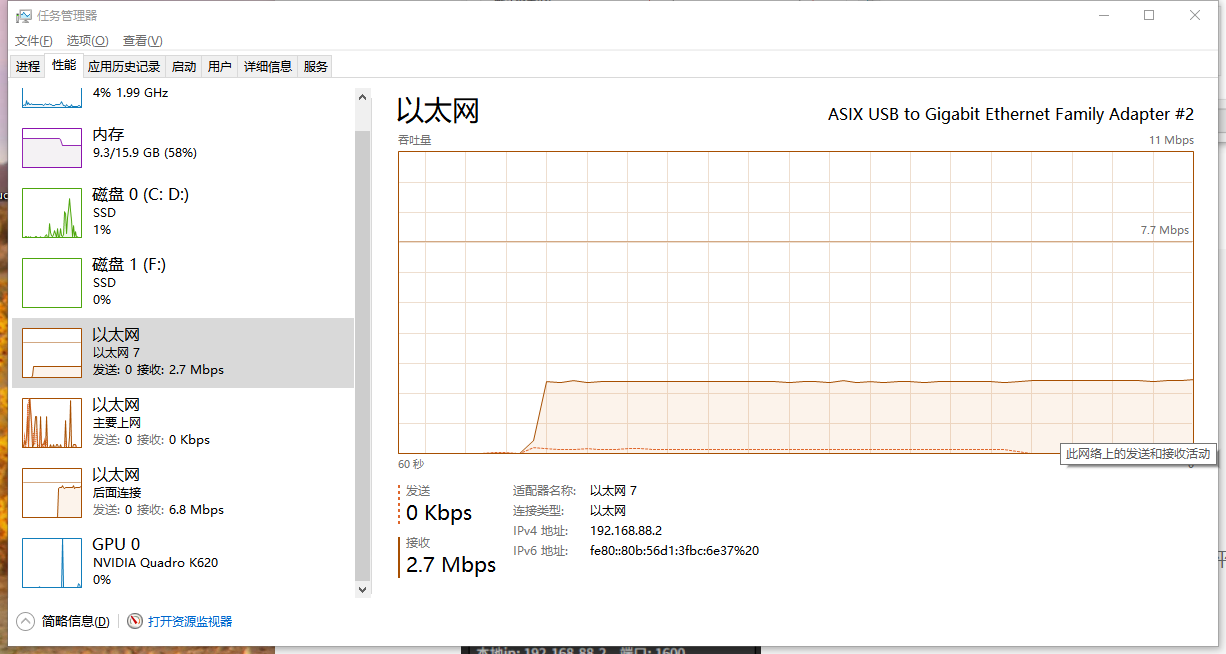
如果没有数据,检查传感器是否是单次模式
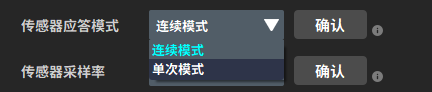
若是单次模式请改为连续模式
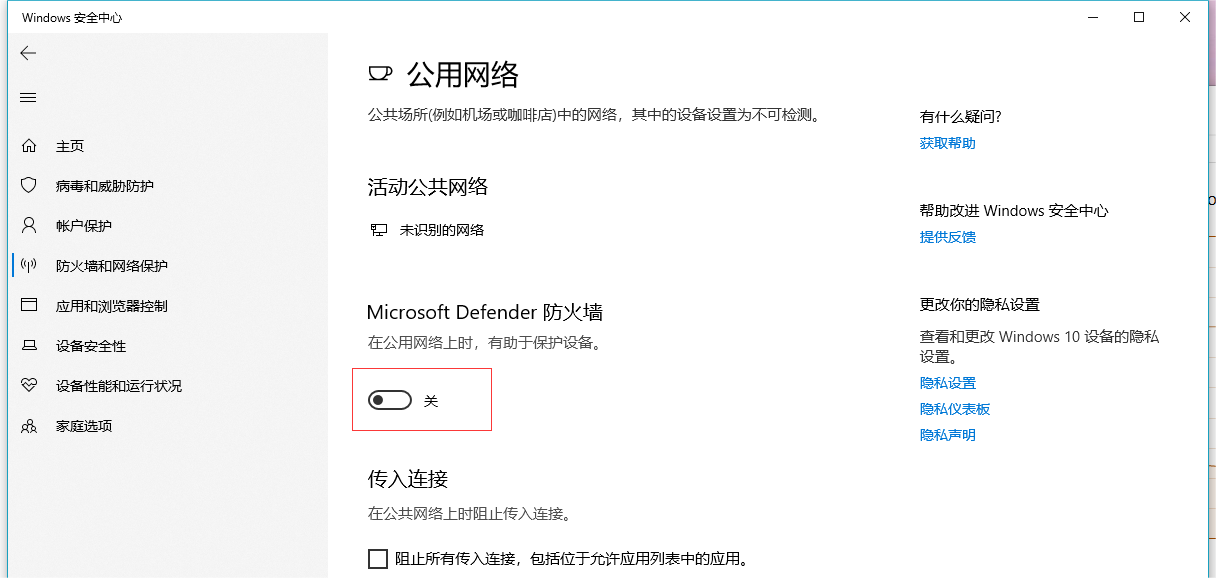
排查步骤3:检查防火墙
要获得振动数据需要关闭防火墙
点击设置进入Windows设置,搜索防火墙

用来连接传感器的网卡设置的是哪种类型的网络就关闭哪种类型的防火墙,如果记不得设置的是哪一种就全部关闭。

点击关闭即可,其他网络依次操作即可
问题二 加速度传感器问题
1.X、Y、Z、向量和各个的值代表什么?加速度传感器为什么可以测试振动?
微振高精度6轴传感器为加速度传感器,x、y、z为各个方向的加速度、向量和是x、y、z的各项平方相加再开根值。加速度传感器通过测量物体的加速度来测量振动。当物体在一定方向上有振动时,加速度传感器会检测到物体的相应加速度,从而可以计算出振动的强度。
2.微振高精度6轴传感器的 Z轴的振动量检测值比X轴和Y轴大很多是什么问题?(传感器平面放置在桌面)

微振高精度6轴传感器为加速度传感器,当传感器静置桌面,即默认Z轴朝地心,所以Z轴有一个重力加速度,即1G(9.8m/s2) 我们传感器值单位为mg (1G=1000mg),所以Z轴大于1000多左右
问题三
使用提供的上位机软件本地保存的传感器数据,本地文件采样有丢点或是采集数据量不同情况。
文件是由上位机写入txt里的,和上位机的配置、保存的算法有关。在高采样率情况下,传感器的数据只负责发送,软件接受再保存会存在一定的损失。如果需要高精度处理,建议更换更好的配置电脑或是自己开发程序,按照协议,高速获取数据。本上位机软件只做示例演示。